
HAPLY ROBOTICS、SIGGRAPH 2025でNVIDIAの技術を使ったリアルタイム物理AIと遠隔操作デモを公開
於 SIGGRAPH 2025, ハプリー・ロボティクスによるハンズオンデモで、ロボット工学、シミュレーション、物理AIの未来を紹介します。 NVIDIAオムニバース、NVIDIAアイザックシムおよびNVIDIA RTXプラットフォームによるハンズオンデモを行います。ブース#728を訪れ、HaplyのInverse3XコントローラとKinovaロボットアームを通して、直感的なハプティクスと強力なシミュレーションがどのように融合するかを体験してください。
その中核となるのが、インテリジェント・ロボティクスのための次世代アーキテクチャであるスリー・コンピュータ・ソリューションです:
ヒューマン・ワークステーション - NVIDIA RTX GPUを搭載したデスクトップまたはラップトップで、リアルタイムの触覚インタラクション、高忠実度シミュレーション、没入型3Dグラフィックスのためのユーザーポータルとして機能します。このワークステーションは世界初:アイザック・シムの高度な物理モデリングによって実現された安定した低周波数の触覚インタラクションを提供し、ユーザーは複雑で低帯域幅の環境であっても、かつてないリアリズムで仮想オブジェクトを感じることができます。
デジタルブレイン - NVIDIA Isaac Sim、Omniverse、およびNVIDIA Cosmosを搭載したデジタルブレインは、シミュレーション、AIトレーニング、およびデジタルツインの同期を、リアルなレンダリングと現実世界の物理学で編成します。また、NVIDIA Isaac GROOTのようなモデルが高レベルの行動制御を提供する一方で、リッチなデモンストレーションデータの取得、模倣学習、およびヒューマン・イン・ザ・ループ強化学習を可能にします。これらのNVIDIAプラットフォームを組み合わせることで、開発者はロボット開発のためのスケーラブルで高速なインテリジェンス・パイプラインを構築することができます。
物理マシン - Kinovaアームのような本物の遠隔操作ロボットを、NVIDIAのAIとシミュレーションスタックを通してトレーニングし、ガイドし、HaplyのInverse3Xデバイスを介して直感的に制御する。このシステムは、人間の動きと力の入力をリアルタイムでキャプチャし、触覚プログラミング、適応動作、物理世界とデジタル世界の間のシームレスなミラーリングを可能にします。
このシステムにより、ユーザーはロボットを直感的に制御し、模倣学習でAIモデルを訓練し、物理的にリアルな環境を構築することができます。これらはすべてリアルタイムで反応します。HaplyのInverse3Xは、このエコシステムに対する人間の3Dインターフェースとして機能し、物理的領域と仮想的領域の両方でタッチ、モーション、意図をキャプチャします。
デモハイライト
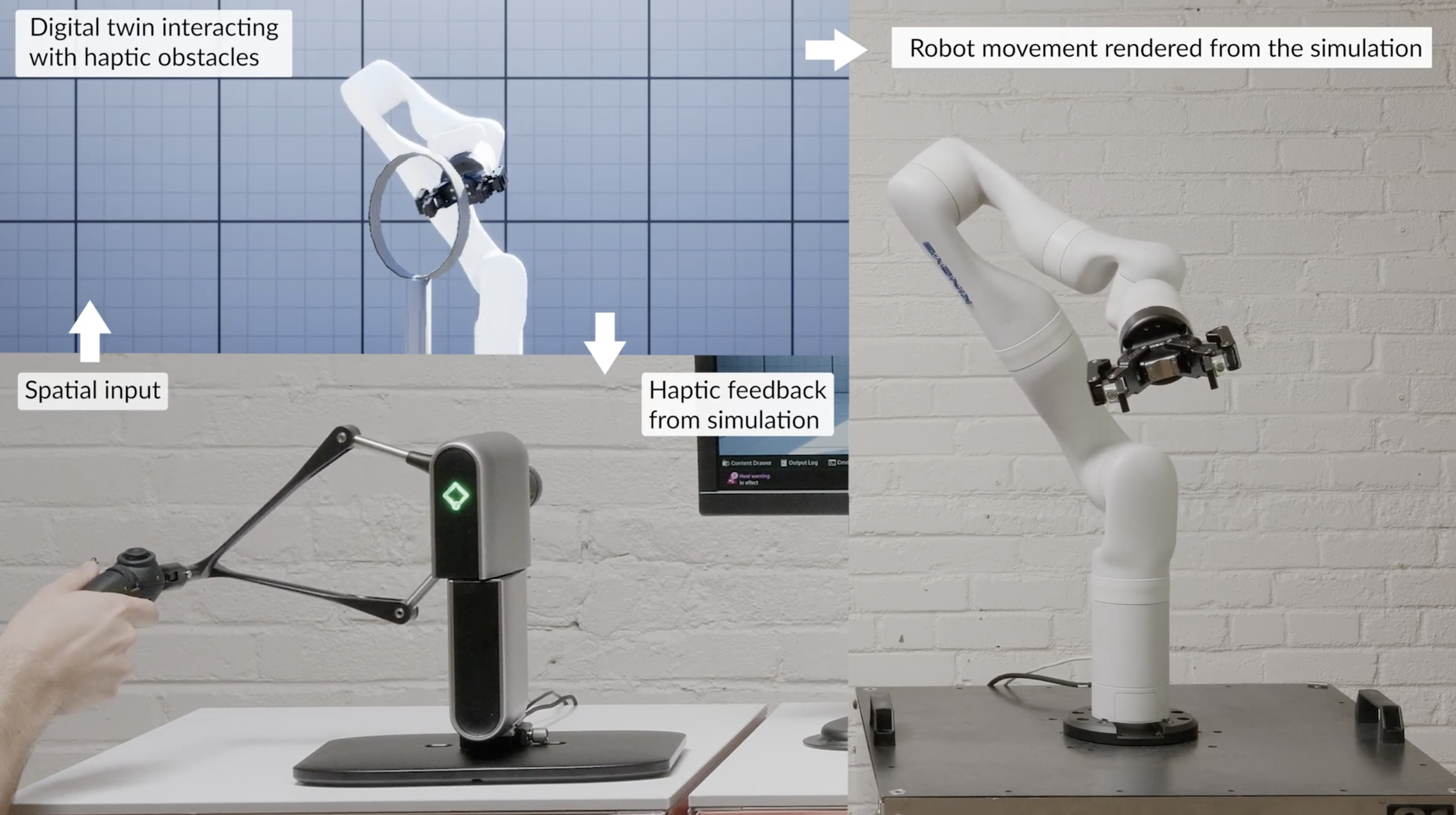
ロボットの遠隔操作とデジタル・ツイン - Kinovaロボットを触覚フィードバックで操作すると同時に、RTX上で動作するIsaac Simを搭載したデジタル・ツインを見ることができます。
NVIDIAのハードウェアとソフトウェアを使用して、システムは複雑な運動学と触覚計算を最大10kHzで実行し、実物そっくりのインタラクションと最小限の待ち時間を保証します。
「私たちは、NVIDIAのスリー・コンピュータ・ソリューションに対する3Dヒューマン・インターフェースです」と、Haply Roboticsの共同創設者であるコリン・ギャラチャー(Colin Gallacher)氏は述べています。「仮想世界の彫刻であれ、ロボットのプログラミングであれ、タッチ操作によるAIのトレーニングであれ、私たちは空間インタラクションを直感的なものにします。
ブース#728で体験してください:
NVIDIA-accelerated real-time digital twins
● Teleoperated robotics
● Isaac Sim + Omniverse integrations
● 実データと合成データを使ったスケーラブルなAIトレーニング
